[VIP第1年] 指数:3
[VIP第1年] 指数:3
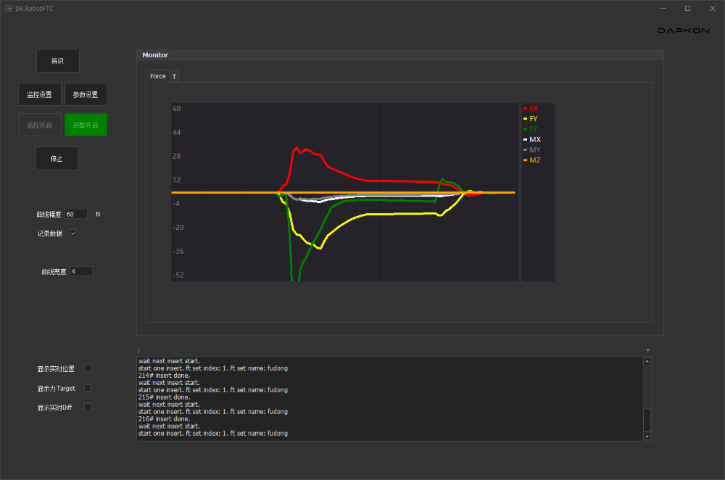
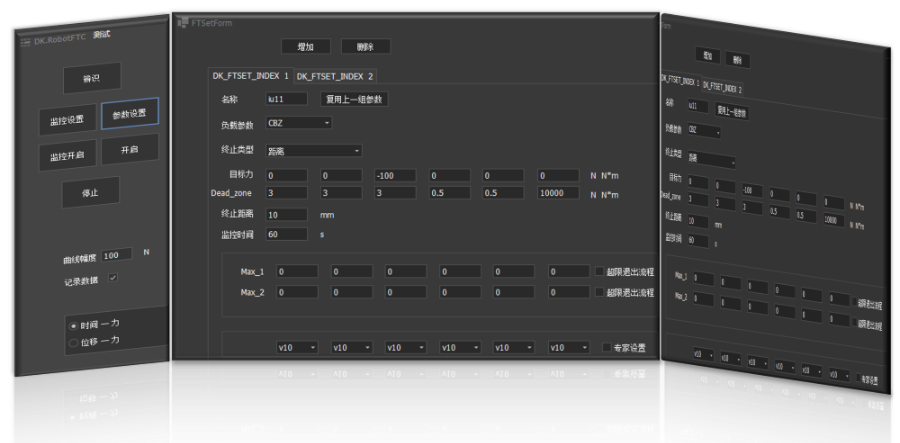
达宽科技的机器人力控系统软件支持两种的补偿类型,提供全方面的运动参数设置,覆盖六个自由度,确保机器人在各种操作环境中都能实现精确控制。通过读取力传感器数据,软件使得机器人能够实时调整位置和姿态,确保作业过程的精确和稳定。达宽科技的机器人力控软件具有位移-力和时间-力两种监控模式。通过实时力位监测技术,实时捕捉力和位置的微小变化,确保装配过程中的每一个动作都达到毫厘之精,同时可以及早识别、纠正和响应过程中的异常,提供了更高的装配精度和控制能力。通过持续监测,能够预防和减少因力位误差导致的质量问题,从而保证长期稳定的高质量输出。机器人力控在精细化操作中展现出性能,达宽科技的创新方案让制造流程更加安全高效。辽宁协作机器人力控使用方法

机器人力控帮助用户节省了时间和人力成本。通过自动化的力控系统,机器人可以自适应调整工作力量,减少了人为干预的必要,从而提高了任务完成的速度。相比传统人工操作,机器人力控能够持续工作且不受疲劳影响,从而提高了工作效率和生产能力。在提高产品一致性方面,机器人力控展现了其独特优势。由于机器人能够根据实时反馈调整力度和动作,机器人在执行相同任务时能够保持极高的一致性和精确度,减少了人为操作的误差,确保了每个产品的质量标准都能得到严格遵循。山西机器人力控技术指导机器人力控系统为企业带来了高效、精确、稳定的生产模式,达宽科技的技术使得自动化生产更加智能化和安全。

机器人力控技术的比较大优势之一是提升生产效率。传统的工业机器人通过预设的路径和动作进行操作,但这种方法在面对复杂的环境或不规则的工作件时,容易出现效率低下和操作不精确的问题。而机器人力控技术通过实时感知外部环境的力量变化,能够根据实际情况灵活调整动作和施力,从而提高工作效率。达宽科技作为机器人力控领域的者,提供的力控解决方案,不仅能够加速生产过程,还能提高机器人的适应性。机器人力控能够精确地应对不同重量、尺寸、硬度的工件,确保机器人能够在多变的生产环境中持续稳定地工作,避免了传统生产方式中的瓶颈和低效。
在高精度要求的制造行业,零部件装配的精度对终产品质量至关重要。机器人力控技术的应用,使得机器人能够精确调节施加的力,确保每一个零部件在装配过程中都能达到理想的接合力和位置,避免了因力过大或过小而导致的装配误差。尤其在精密仪器、电子产品以及机械等领域,机器人力控技术的精细度能够确保零部件的完美契合,减少了产品的返工率。达宽科技的机器人力控系统,不仅提升了生产过程中每个环节的精度,还确保了整个生产线的稳定运行,优化了终产品的装配质量。机器人力控技术为生产环境带来了更高的灵活性,达宽科技帮助企业应对复杂多变的工作任务。

机器人力控在提高生产安全性方面也发挥着重要作用。在复杂的生产环境中,机器人与环境、物体之间的相互作用可能会导致设备损坏或人员伤害。而机器人力控技术通过精确控制机器人施加的力量,避免了机器人过度施力或不当操作,从而降低了安全风险。机器人力控不仅可以保护生产设备,还能够确保操作人员的安全。达宽科技的机器人力控系统,通过实时监控和反馈机制,能够在机器人发生异常行为时立即做出调整,有效防止设备损坏和人员伤害,保障了生产过程中的安全性。这使得机器人能够在更为复杂的环境中安全高效地作业,为企业提供了更高的安全保障。机器人力控系统为企业带来更智能的生产方式,达宽科技的技术优化了工作流程并提高了整体生产效能。辽宁协作机器人力控设计
通过达宽科技的机器人力控系统,企业能够优化生产流程,减少人为失误,确保工作效率和产品一致性。辽宁协作机器人力控使用方法
机器人力控技术,也称为力反馈控制技术,是指在机器人的操作过程中,通过将传感器检测到的力或力矩信息,反馈到控制系统,通过力控算法的解算,进而调整机器人的动作,以实现精确力控制的一种技术。想象一下,如果你的手能感觉到每一个细微的触感,并根据这些触感调整动作,这就是力控技术想要达到的效果。机器人力控技术的主要原理可以概括为以下几个步骤:1,力觉感知:利用力传感器检测机器人与外界环境的交互力。2,信号处理:将感知到的力信号进行一系列的滤波处理,去除一些不必要的噪音,然后将信号传输到控制系统。3,控制决策:根据信号和预设的控制算法,计算规划出机器人下一步的动作。4,执行动作:将控制指令传递给机器人的执行机构,实现精确的动作调整。辽宁协作机器人力控使用方法
文章来源地址: http://smdn.m.chanpin818.com/ruanjian/rjkfgs/deta_26593223.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。